Temporal Normalizing Flows
Published:
Normalizing flows provide a practical way to learn a probability density and sample from it by pushing forward a simple base distribution (e.g., a standard Gaussian) through an invertible mapping. This post describes a temporal extension—conditioning the flow on time, to model time-dependent densities \(p(t,x)\), with a physics-informed regularization based on a Fokker–Planck equation (FPE).
Motivation
Many stochastic systems are described by an SDE
\[dX_t = a(X_t,t)dt + b(X_t,t)dW_t,\]whose probability density \(p(t,x)\) satisfies the Fokker–Planck equation (in 1D)
\[\partial_t p(t,x) = -\partial_x\!\big(a(x,t)\,p(t,x)\big) + \tfrac12\,\partial_{xx}\!\big((b(x,t))^2\,p(t,x)\big).\]In applications, we often care about an observable \(Y_t=\psi(X_t)\) rather than the full state. Learning \(p_Y(t,y)\) directly from data/simulation can be viewed as learning a reduced-order PDF model, which captures uncertainty evolution in a lower-dimensional space and supports downstream tasks such as uncertainty quantification, likelihood evaluation, and sampling.
Normalizing flows
Main objective. Given samples \(\{x_i\}_{i=1}^N\sim p_X\), learn a tractable density model \(p_X(x)\) that supports both evaluation and sampling.
Let \(z\sim p_Z\) be easy to sample (e.g., \(p_Z=\mathcal{N}(0,I)\)). A normalizing flow learns an invertible map
\[x = f_\theta(z), \qquad z=g_\theta(x)=f_\theta^{-1}(x).\]By change of variables,
\[p_X(x;\theta) = p_Z\!\big(g_\theta(x)\big)\, \left|\det\left(\frac{\partial g_\theta}{\partial x}(x)\right)\right|.\]Equivalently,
\[\log p_X(x;\theta) = \log p_Z(z) - \log\left|\det\left(\frac{\partial f_\theta}{\partial z}(z)\right)\right|,\quad z=g_\theta(x).\]Maximum likelihood. Maximizing likelihood is equivalent to minimizing KL divergence up to constants; in practice we minimize negative log-likelihood:
\[\mathcal{L}_{\text{NLL}}(\theta) = -\frac1N\sum_{i=1}^N \log p_X(x_i;\theta).\]Temporal normalizing flow
A clean and common way to add time is to condition the flow on time: \(x = f_\theta(z;\,t),\qquad z=g_\theta(x;\,t).\)
Invertibility is required in \(x\leftrightarrow z\) for each fixed \(t\). Time is treated as an input/conditioning variable.
Then the time-dependent density model is \(p(t,x;\theta)=p_Z\!\big(g_\theta(x;\,t)\big)\, \left|\det\left(\frac{\partial g_\theta}{\partial x}(x;\,t)\right)\right|.\)
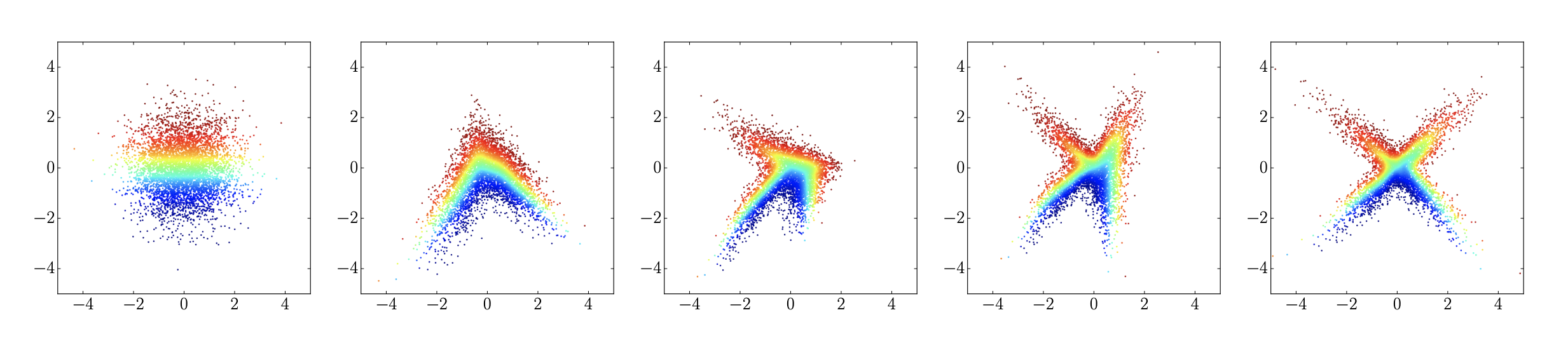
Figure: Flowing samples from a unimodal Gaussian over time (schematic; see Feng et al., 2022).
Physics-informed training via the FPE
If one knows the governing FPE (or want to bias toward an FPE solution), one can add a PDE residual penalty.
Let \(\hat p(t,x)=p(t,x;\theta)\). For diffusion with constant \(\kappa\),
\[\partial_t p = \kappa\,\partial_{xx}p,\]define the residual
\[r(t,x;\theta) = \partial_t \hat p(t,x) - \kappa\,\partial_{xx}\hat p(t,x).\]Train with a hybrid objective:
$$ \mathcal{L}(\theta) = \mathcal{L}_{\text{NLL}}(\theta)
- \lambda\,\mathbb{E}{(t,x)\sim\Omega}\big[r(t,x;\theta)^2\big]. \(where $\Omega$ defines the spatio-temporal grid; in practice,\)\partial_t \hat p\(and\)\partial{xx}\hat p$$ are obtained by automatic differentiation (e.g., PyTorch autodiff).
This is analogous in spirit to physics-informed neural networks (PINNs), but applied to probability densities and does not have a need to define soft penalties for nonnegativity and mass conservation.
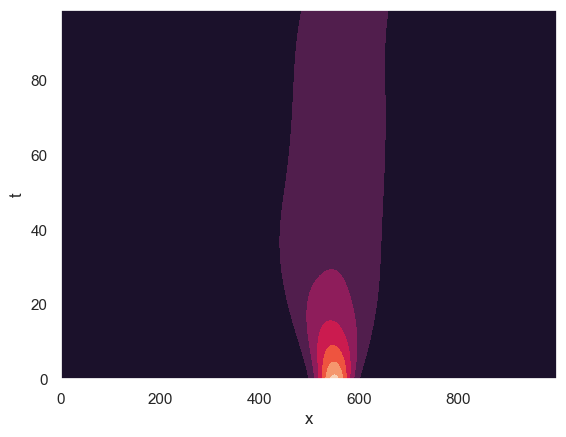
Numerical example: Brownian motion / diffusion
Consider 1D Brownian motion with diffusion coefficient \(\kappa>0\). The density solves \(\partial_t p(t,x) = \kappa\,\partial_{xx}p(t,x).\)
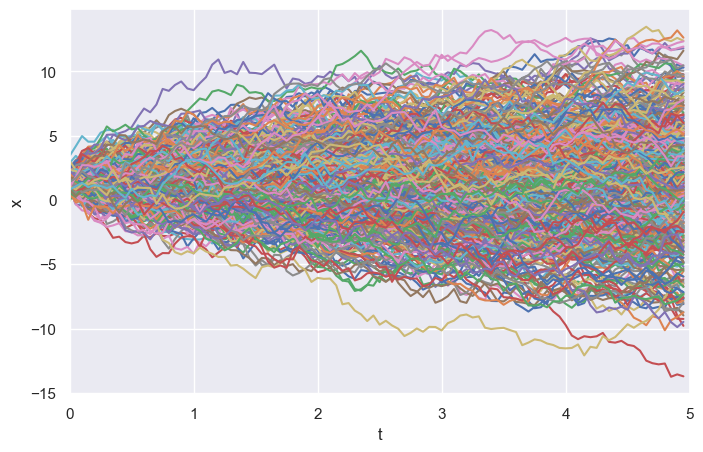
Simulated trajectories
Below is an ensemble of simulated trajectories (Monte Carlo samples):
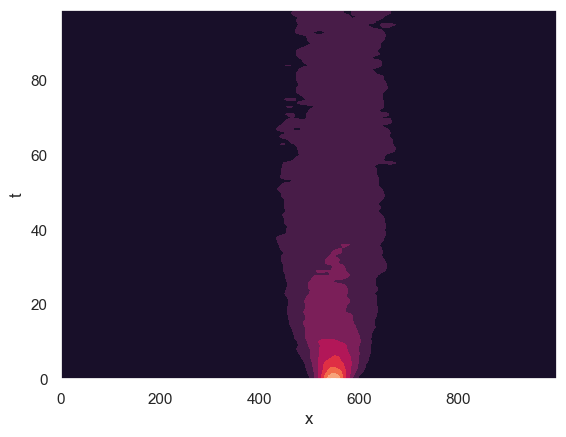
Density estimation: KDE vs temporal NF
A baseline is a time-sliced Gaussian KDE. A temporal normalizing flow learns a smooth \(t\)-conditioned density model:
Directions
A natural next step is to formulate the temporal normalizing flow as a physics-informed density surrogate for time-dependent Fokker–Planck dynamics. Concretely, let \(\hat p(t,x;\theta)=p_Z\!\big(g_\theta(x;t)\big)\left|\det\!\left(\frac{\partial g_\theta}{\partial x}(x;t)\right)\right|,\) where \(g_\theta(\cdot;t)\) is invertible in \(x\) for each fixed \(t\). One may train \(\hat p\) by combining sample-based maximum likelihood with a PDE residual penalty of the form \(\mathcal{L}(\theta) = -\frac1N\sum_{i=1}^N \log \hat p(t_i,x_i;\theta) + \lambda \,\mathbb{E}_{(t,x)\sim\mu}\!\left[\mathcal{R}(t,x;\theta)^2\right],\) where \(\mathcal{R}\) is the Fokker–Planck residual, e.g. \(\mathcal{R}(t,x;\theta) = \partial_t \hat p + \nabla\!\cdot(a\,\hat p) -\frac12 \sum_{i,j}\partial_{x_i x_j}\!\big((BB^\top)_{ij}\hat p\big).\) This provides a competing model for PINNs that claim to solve Fokker-Planck equations.
A second direction is to use this framework for reduced-order PDF methods. Given a low-dimensional observable \(y=\psi(x)\), one may learn a temporal flow model for the reduced density \(\hat p_Y(t,y)\) directly from projected trajectory data, and then test whether \(\hat p_Y\) approximately satisfies a closed effective transport or Fokker–Planck equation in the reduced coordinates. This would turn the temporal flow into a tool for closure discovery.
From a numerical perspective, the key technical questions are: (i) approximation of \(p(t,x)\) and its derivatives by time-conditioned invertible maps, (ii) stability of training under joint likelihood and PDE residual objectives, and (iii) comparison against KDE, histogram-based solvers, and classical Fokker–Planck discretizations in terms of likelihood error, Wasserstein error, and residual consistency. These questions are especially relevant in moderate and high dimensions, where direct grid-based PDF solvers become prohibitively expensive.
References
- Xiaodong Feng, Li Zeng, Tao Zhou. Solving Time Dependent Fokker-Planck Equations via Temporal Normalizing Flow. Communications in Computational Physics, 32(2):401–423, 2022.
- Gert-Jan Both, Remy Kusters. Temporal Normalizing Flows. arXiv:1912.09092, 2019.
- Maziar Raissi, Paris Perdikaris, George Em Karniadakis. Physics Informed Deep Learning (Part II): Data-driven Discovery of Nonlinear Partial Differential Equations. arXiv:1711.10566, 2017.
- Adam Paszke et al. Automatic differentiation in PyTorch. 2017.
Leave a Comment